在开始阅读本文之前,点评君想先问问坐在电脑前的你,是不是曾经也幻想过这样一幅景象:驾车奔驰在高速公路上,你坐在驾驶席上一边看报纸一边跟后座的孩子们聊着天,车子自己会自动完成正常行驶,超车,乃至于避让行人等等一系列工作。嗯,不管你有没有,起码点评君是梦想过这一刻的。这能让无聊的长途奔袭和扰人的拥堵时段都变成了可以用来读书看报与孩子沟通感情的黄金时光,对么?
好消息是,这一刻似乎不再是科幻小说中的场景了,沃尔沃的“Drive Me自动驾驶技术”确实在某种程度上做到了上面所说的一切。但别高兴得太早,就像每一个侦探故事一样,事情总会有个“But”,到底是怎么回事儿?请随点评君一起往下看吧:
受沃尔沃的邀请,上周末点评君参加了全中国首批名为“Drive Me China”的沃尔沃自动驾驶体验项目。一大早驱车赶到丰台区园博园,在开始真正的驾驶体验之前,沃尔沃高层领导先给媒体们开了个小会,主要是讲了讲沃尔沃为什么要搞自动驾驶,以及今天的活动安排,大家简单看一下下面的图吧:

△ 这是沃尔沃自动驾驶工程师们研究的领域,涵盖了由社会环境适应性到法律法规完善性的几乎所有与自动驾驶汽车相关的项目。
△ 沃尔沃认为,人是会犯错的,而大多数交通事故都是由于人类主观性错误引发的。因此,研发一套不会犯错的自动驾驶程序,能够最大限度的避免交通事故的发生。
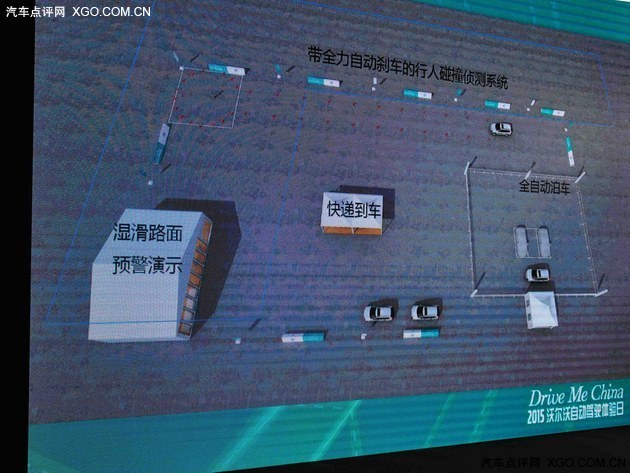
△ 随后便是今天的体验项目介绍了,当然,最激动人心的自然不是这些场地项目,而是下面的这张图:

△ 沃尔沃真的从瑞典进口了一台带有自动驾驶功能的V60工程样车来到了北京!今天我就将坐着它沿着这上面的路线在公共道路上体验一圈真正的自动驾驶。似乎,曾经的梦想,真的要照进现实了?!
首先进行的是场地项目的体验。这部分点评君就简单说说吧,毕竟相对于马上就要在公共道路上进行的自动驾驶体验来说,平日十分值得期待的场地项目们今天看上去确实有些索然无味了。

△ 先来体验一下“快递到车”服务。这个项目顾名思义,就是沃尔沃扮演了快递员的角色:比如你在京东上买了个电脑,这时可以委托沃尔沃的快递员帮你把电脑从京东的发货仓库直接送到你车的后备箱里。








△ 这就是操纵车辆自动泊车的手机App,你只需把车开到车库入口,下车,用手机点一下开始泊车(Park Now),剩下的活儿就交给车子自己了。

△ 第三个项目就是行人碰撞保护,顾名思义,当车快撞上的行人的时候,安全系统能够把车完全刹停。



△ 眼看着要撞了!现在直觉告诉点评君应该把脚挪到刹车上了,但点评君本着:“反正这不是真人,车也不是自己的车”这个基本原则,依然面不改色的对着假人行驶。

△ 在假人面前10米不到的地方,S60的自动刹车介入了,仪表盘提示自动制动,然后就是电脑自动的一脚重刹,要不是有安全带,点评君差点儿拍在方向盘上。

嗯,看完上面这一堆场地项目,是不是急着想看看重头戏了?那么请继续往后看:
期待已久的重头戏终于要上演了——沃尔沃自动驾驶体验:
*需要特别说明的是,我们本次体验的车辆为工程试验车,目前自动驾驶并不是一项完全成熟的技术,还处在试验和测试阶段,所以下文出现的小插曲客位看官也不必惊慌!

△ 就是从这里出发,首先由沃尔沃的工程师进行人工驾驶,在驶入北京西六环路之后,转为自动驾驶。



△ 从车里看,开车的哥们已经开始从容的喝水了。现在时速为70公里每小时,由于内侧为超车道,所以车辆自动行驶在最外侧车道,十分遵守交规。


△ 工程师哥们兴奋地讲着沃尔沃自动驾驶的美好前景,然后,扫兴的一幕出现了:车载电脑崩溃了...数字仪表盘直接蓝屏,它,死机了...

△ 过了5秒钟,蓝屏变成了雪花屏,同时自动驾驶功能以及所有车辆电子设备都死机了,连ESP都没了。嗯,别忘了,我们现在正在以每小时70公里的速度奔驰在平均车速都很快的西六环快速路上呢!!

△ 没有时速表,没有转速表,没有ESP,没有预碰撞辅助,连音响都停了。嗯,我们正开着一台“盲”车行驶在西六环上...



看到这里,点评君想很多读者可能会有这样一种想法:妈呀这也太危险了!要是我开着普通车在高速上突然没有时速表也没有转速表了,都能吓死自己,这自动驾驶车出了这种问题,不是更恐怖?!因为自动驾驶车辆的电脑能自动控制油门刹车和转向啊,车载电脑一死机,一旦失控了,这是要出人命啊!
没错,你的担心正是现在自动驾驶系统的症结所在:一旦系统出于任何原因崩溃了,那么后果都将是灾难性的,正是因为自动驾驶系统是一套高度智能的系统,并且其对于车辆拥有几乎全部的控制权,所以一旦出现问题,那么后果不堪设想。
事后点评君咨询了来自沃尔沃瑞典研发部的工程师,就是开车的那帅小伙。他表示,这次死机是由于在六环路上正常行驶时,连续有四台社会车辆从我们右边的应急车道超越了我们的这台自动驾驶状态的V60...
由于这台V60的行车电脑从未在瑞典哥德堡以外的地方运行和调试过,所以电脑里并没有应对“应急车道超车”这么个程序。所以当面对我们祖国拥有“优良驾驶习惯”的司机们占用应急车道超车的做法时,显然,它慌了...然后位于车辆右侧的车道传感器连续读取了过多的超车数据(一下来了四组数据,每辆车一组),电脑又没有针对这些数据的处理程序,于是,它干脆就直接崩溃死机了。

后来我跟这位瑞典工程师聊了很多,他说,其实在中国开展道路测试从某种意义上来讲,是有很多优势的。比如“占用应急车道超车”这么个情况,在瑞典几乎不可能发生的,所以他们自然没有为其准备任何处理程序。但在中国,这种事情简直太司空见惯了,所以在我们的道路上,沃尔沃的工程师能够收集到大量的数据,从而对其自动驾驶系统进行有针对性的改进。我还提到,如果雷达受到干扰的话,自动驾驶系统还会工作么?他表示,不会,但车辆会迅速用车内音响和仪表盘声光警示来提醒驾驶员:由于多种原因,自动驾驶将要终止了,现在是时候由驾驶员接管车辆了。
点评君接着问到,如果驾驶员依然撒手不管呢?他表示:那么,车辆就会自动打开双闪,然后慢慢停靠到路边,然后自动挂入P挡并拉上手刹,但不会熄火,就那么停着等着驾驶员进行人工驾驶再上路。
帅气工程师小伙特意提到,未来的量产版沃尔沃自动驾驶车辆一定会装备两套平行的驾驶系统,进而确保在有一套系统因任何原因“罢工”后,车辆还有备用系统能够介入并保证安全驾驶。由于我们的这台工程样车只有一套驾驶系统,所以一旦出现今天的情况,那么就彻底没有回天之力了。
跟这个瑞典小伙子聊了半天,让点评君对自动驾驶有了全新的认识。以前点评君以为有了ACC自适应巡航跟车道偏离辅助,似乎自动驾驶就水到渠成了。今天的这次经历让我明白,真正的自动驾驶,跟ACC或是车道偏离辅助有着巨大的区别,其需要处理的数据量是前者的几百倍乃至上千倍,完全自动驾驶时系统需要面对的路况和高速巡航有着天壤之别,而沃尔沃的宗旨是:在即使驾驶员完全不干预车辆驾驶的前提下,无论遇到何种情况,如果无法继续自动驾驶或是无法保证自动驾驶状态下的车辆安全时,车辆都应该能够安全的减速并停靠在路边。
别看写起来就两三句话,但真的要实现上面那段黑体字里的事情,需要巨大的努力和投入,沃尔沃的工程师们需要考虑到平常上路开车时几乎所有百年一遇的奇葩情况,并一一为它们写出处理程序。
至少从今天的体验中我看得出来:自动驾驶,理想很美好,但现实,确实不太好。但相信在2017年第一批沃尔沃自动驾驶车辆在哥德堡投入运营的时候,一切会比今天的情况有巨大的改变。沃尔沃Drive Me自动驾驶,点评君期待着与你两年后的重逢。






